
I. ELECTROSEARCH - INVENTORY SOFTWARE IN JAVA
Made in 2014 with the collaboration of Eldio Luiz Cortez Neto, ElectroSearch is a catalog and managing software of eletronical components. The app was a solution for the problem verified on the Laboratory of Electricity and Electronics of IFRN - Campus Currais Novos. At the place of classes and practices, students and teachers did not have total conscience of what were the accessible components on the laboratory, which made slower the work and project's realization. The application was implemented to a desktop environment and intend to keep constant updates at the Institute's local network. The goal was to turn possible a simple research to the database, where teachers and students may find plenty of mechanical and electronical's components placed at the laboratory, as well as your specifications. The software was made using Java, the pattern UML 2.0, MySQL WorkBench and the NetBeans IDE 8.0. These technologies were supported by object-oriented programming’s techniques and architecture MVC (Model, View, Controller), the same ones turned possible an organized, well done end and an easier maintenance of the software. This project's paper is unfortunately in Portuguese, but it contains prints of the final version of the software and diagrams that describe how it was modeled. It's possible to access the paper here. And the entire software, including database designs is availabe on my GitHub.

II. JCLIBRARY - LIBRARY MANAGEMENT SOFTWARE IN C++
Made in 2013 with the collaboration of Júlio Manoel de Sousa Paulino and of Leniel Fernandes Pereira Filho, JCLibrary is a library management software developed as a final task for a programming course at IFRN. It was developed with concepts of object-oriented programming and the user interface design with QtCreator. The appication basically allows a institution to have control over the books and the students and staff to consult, take and return a material. The project is available at my GitHub.
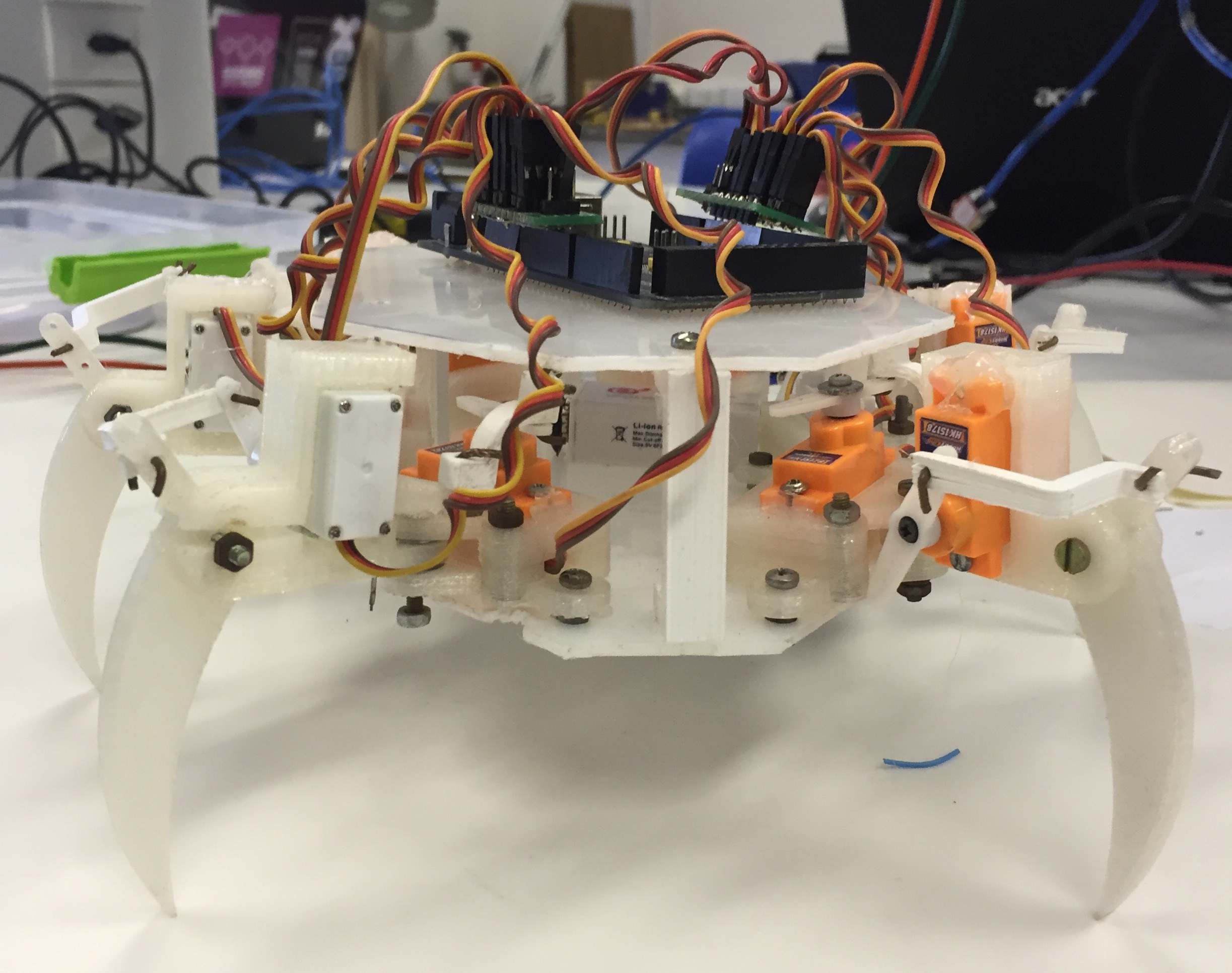
III. SCRAB, THE SIX LEGGED ROBOT
Started in 2015 by Dr. Orivaldo Vieira Santana (orivaldo@gmail.com), professor at Universidade Federal do Rio Grande do Norte, Scrab is a low cost robot designed for educational purposes. The chassis and structure of the robot are made of nylon and 3D printed parts and the hardware and software are based in Arduino. Though its structure is simple, we implemented a algorithm based on the movements of an ant and with machine learning principles. The second phase of the project intend to make the movement based on a neural network. The first paper that this project generated is availabe in this link.
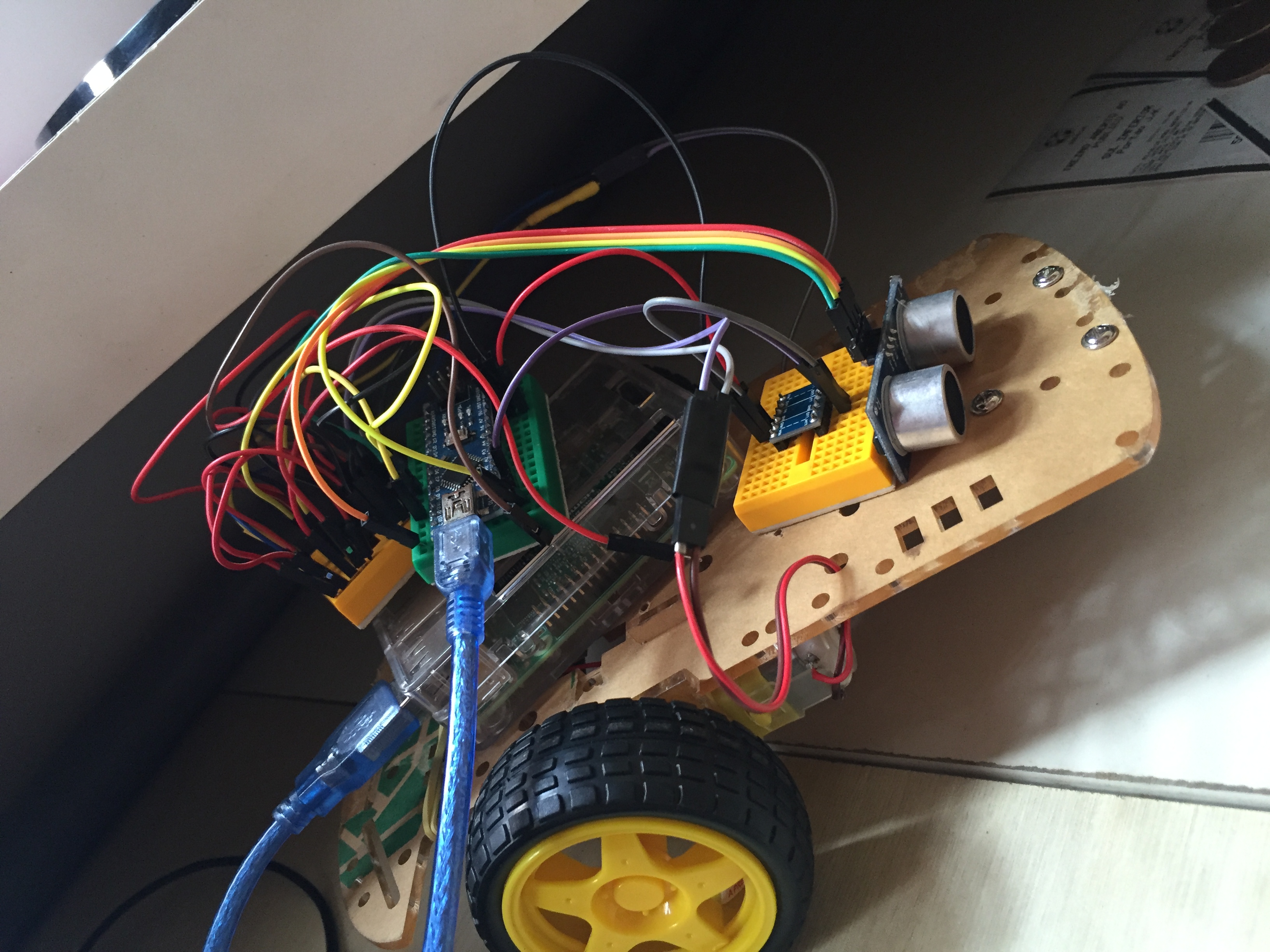
IV. COLOR AND TAG TRACKER ROBOT
For a IEEE Open Challenge, one of the steps for the solution involved a robot which followed a specific color and specifics tags, one of the which was to build a color and tag tracker robot. Using OpenCV and Aruco, it was possible to let the robot recognize with a webcam all the objects and places it was supposed to follow; and then, go right into that direction. Concepts of PID (Proporcional, integral and derivative) were also used. The main hardware includes a Raspberry Pi and a Arduino Uno, and the communication between them is through serial and GPIO ports. The software was implemented in C++. The robot is completely autonomous.
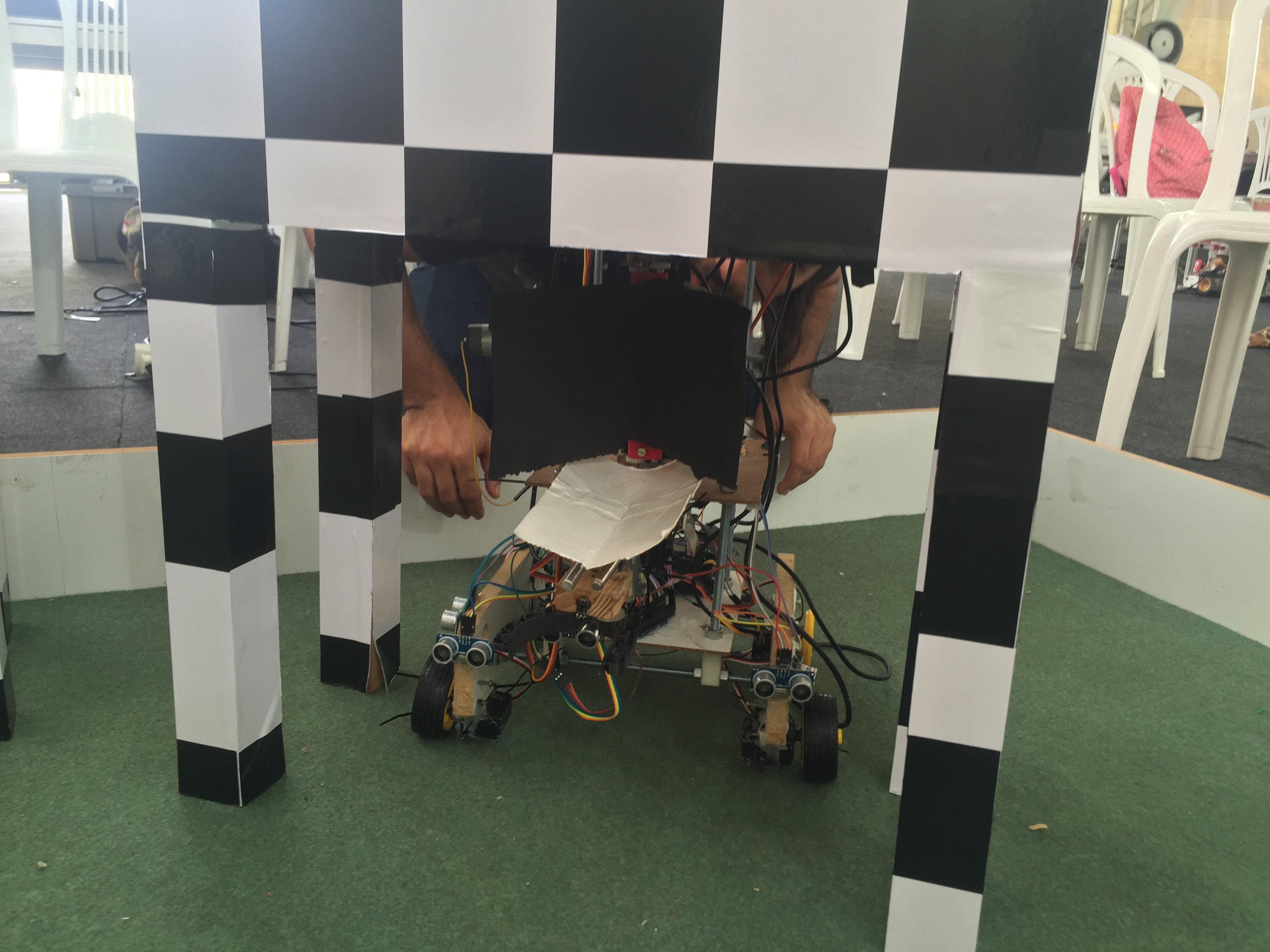
V. IEEE OPEN COMPETITION ROBOT
The final solution for the IEEE Open Challenge was a robot capable of grabbing a plastic glass, identifying and milking a miniature of a cow (with OpenCV and principles of Computer Vision) and storing what it milked. I was part of the team that competed in 2016 and I'm on the team that is also going to compete in 2017. The competition takes place at LARS (Latin American Robotics Symposium). In the first version of the robot, I was responsible for some computer vision algorithms, the PID control of the robot movimentation and the machine of states. The main hardware of the robot included a Raspberry Pi, a Arduino and multiple sensors. The software was implemented in C++ and also the OpenCV library. At this year's competition, I'm responsible for the entire computer vision programming. The beta version of the "cow-finding" algorithm can be found in my GitHub, and the Team Description Paper (TDP) can be found in this link.
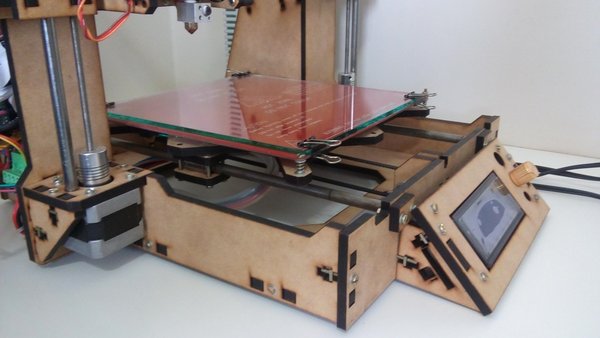
VI. 3D-PRINTING EXPERIENCE
Since 2015, Dr. Orivaldo Vieira Santana (orivaldo@gmail.com) started a project to build a 3D printer from scratch. A group of about six students built the printer on approximately eigth months. The main reason of the delay on the builting process was the waiting for the components bought from China; althoug it made the project last longer, it turned the final price cheaper. Besides helping in the 3D-Printer building, I was also one of the students responsible for the printing. The model of the 3D-Printer is Prusa i3 (functional with Arduino) and the softwares we used were CURA and Slic3r.

VII. GIM - ARDUINO DAY
I am member of a group of students which name is GIM (Maker Integration Group - Grupo de Integração Maker). The group was founded with the ideia of making the university skills more attractive. In the beggining, with Arduino the group would make projects and discover the, back then, new board. Now, the group has grown and has another principle. We organize workshops for those who wants to join GIM and teach future members the basics os eletronics and Arduino. With the basics, the group members are encourage with challenges or competitions to create from scratch something that would solve the problem: for example, a boat moved with servomotors, a small car or even a hibrid robot. We also spread the ideia of the Maker culture, the "do it yourself". Among others college events, we are responsible for the Arduino Day that happens in Natal. We organize workshops, tables, talks, lectures about Arduino, Raspberry, robots, IoT and technology in general. I'm a member of GIM since 2015.
VII. Maestro Project
Learning a gesture pertains to learning a expression of motion by a human, involving the hands, arms, face, head, and/or body. In this work, we propose to employ haptic feedback as an additional tool in the gesture following/evaluation loop. Accordingly, the user wears a haptic wearable device in the form of a bracelet which vibrates according to the trajectory error. Our research hypothesis is then to investigate whether such haptic device aids the user in correcting his movement in srelation to the prerecorded trajectory.